|
Часть 1 I Часть 2
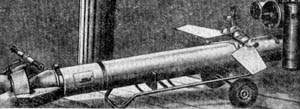
Маневрировал «Pegasus» при помощи носовых и кормовых горизонтальных рулей, перемещавшихся ручным приводом, и вертикального руля, приводившегося в движение приводом ножным.
 |
| Рис 4 |
Упомянутый выше датчик наличия воды в прочном корпусе срабатывал при обнаружении влаги, и, по команде автоматического устройства, аппарат всплывал на поверхность. Водолаз во время движения обычно располагался на корпусе в лежачем положении, однако в ряде случаев он мог путешествовать сидя, для чего в средней части транспортировщика размещалось седло велосипедного типа.
Повторим еще раз, что «Pegasus», по сути, первая крупная разработка конструктора в этой области, явно не предназначался для использования в военных целях, однако идеи, заложенные в его конструкцию, накопленный при проектировании и эксплуатации опыт был использован при создании боевых подводных аппаратов третьего поколения.
 |
| Рис 5 |
Добавим, что в 1969 году в США появилась модель ПСД «Pegasus – М-114-Е», обладавшая более высокими характеристиками: скорость – 3 узла при дальности хода 7 миль при рабочей глубине погружения до 122 м, с более мощным электродвигателем и энергоемкими батареями. При этом компоновка и габаритные размеры аппарата остались неизменными; лишь немного выросла полная длина.
При подготовке материала были использованы следующие источники:
1. Воинов М.К., Митрофанов А.Л. Негерметизированные подводные аппараты для передвижения акванавтов и транспортировки грузов./В сб. «Судостроение за рубежом». Л: ЦНИИ «Румб», 1973, № 4. С. 61 – 70.
2. Дмитриев В.В., Дорофеев Ю.П., Суворов К.Г. Подводные «москиты». М: Воениздат, 1969. – 125 с.
3. Фонд Ребикофф-Нигеллер.
Конец...
Часть 1 I Часть 2
|
|